Anushtup Nandy
Designing intelligent autonomous systems.
I'm a Robotics Engineer and Researcher at the intersection of motion planning, reinforcement learning, and control systems and my dream is to be at the frontier of building the next generation of robotic intelligence.

About Me.
I'm a Robotics Engineer pursuing my MS at Columbia University, with a background in Mechanical Engineering from BITS Pilani. My core passion lies in solving complex problems in robotics, from bio-inspired propulsion to advanced pathfinding algorithms.
My approach combines rigorous analytical principles with creative, hands-on development. I thrive on architecting high-performance algorithms, leading projects from concept to validation, and mentoring teams to achieve ambitious goals.
I bridge the gap between abstract control theory and hardware that actually works in the real world. My work centers on one goal: giving robots the mathematical intuition to navigate complex, high-stakes environments with precision.
Track Record
- Commercial Impact: At Neocis, I developed dynamic models for the YOMI surgical arm that directly enabled advanced compliant motion and reduced system costs by 20%.
- Algorithmic Depth: At Carnegie Mellon University, I engineered a novel Heuristic-Search algorithm for pathfinding that outperformed baselines by 2-8x, resulting in two IEEE RA-L publications.
- Full-Stack Execution: From securing funding for bio-inspired underwater vehicles at BITS Pilani to designing haptic controls for rehabilitation at Columbia's ROAR Lab, I own the entire lifecycle - from first-principles math to hardware deployment.
Core Competencies
Robotics Development
End-to-end project execution from design (CAD, 3D Printing) to control system implementation (ROS, C++, Python).
Algorithm Design
Architecting high-performance algorithms for motion planning (A*) and reinforcement learning (DQN).
Data-Driven Validation
Using advanced instrumentation (NI DAQ, High-Speed Cams) and data analysis (Python, OpenCV) to quantify performance.
Project Leadership
Mentoring junior engineers, securing project funding, and translating engineering solutions into tangible outcomes.
Featured Projects.
ChemsynthAI
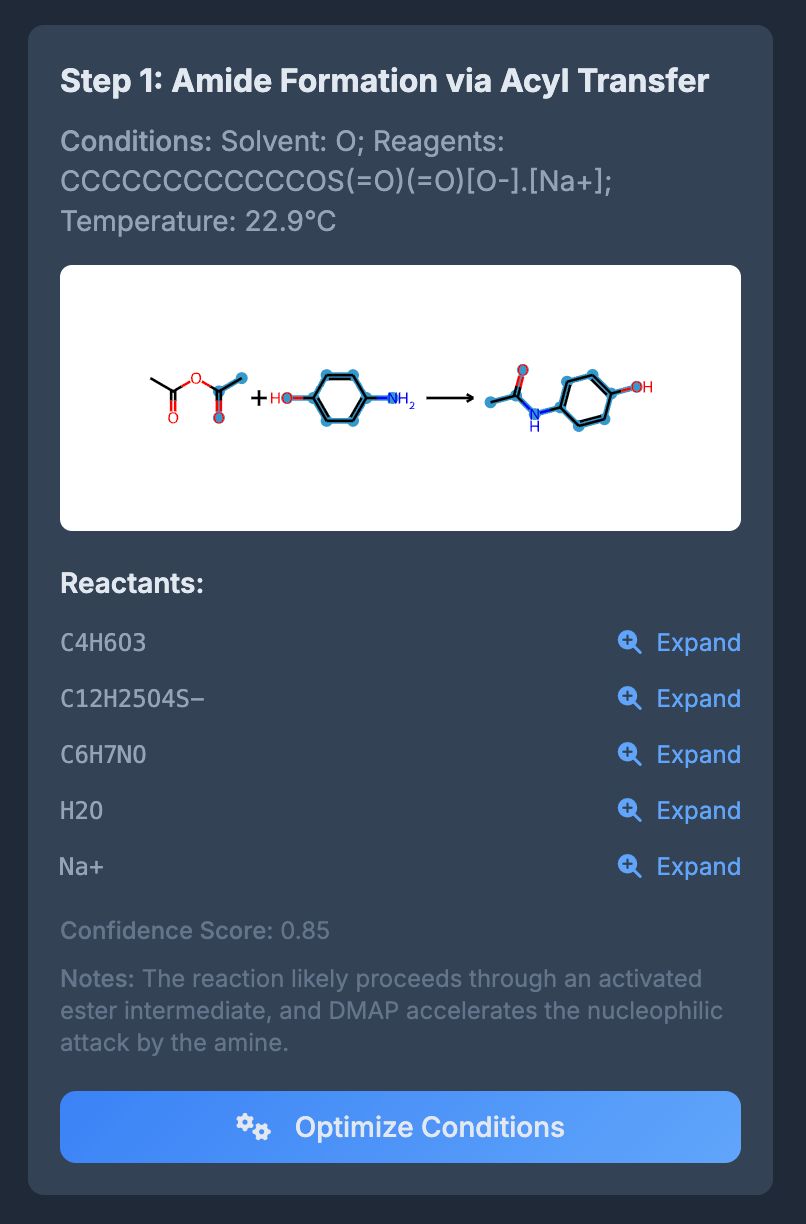
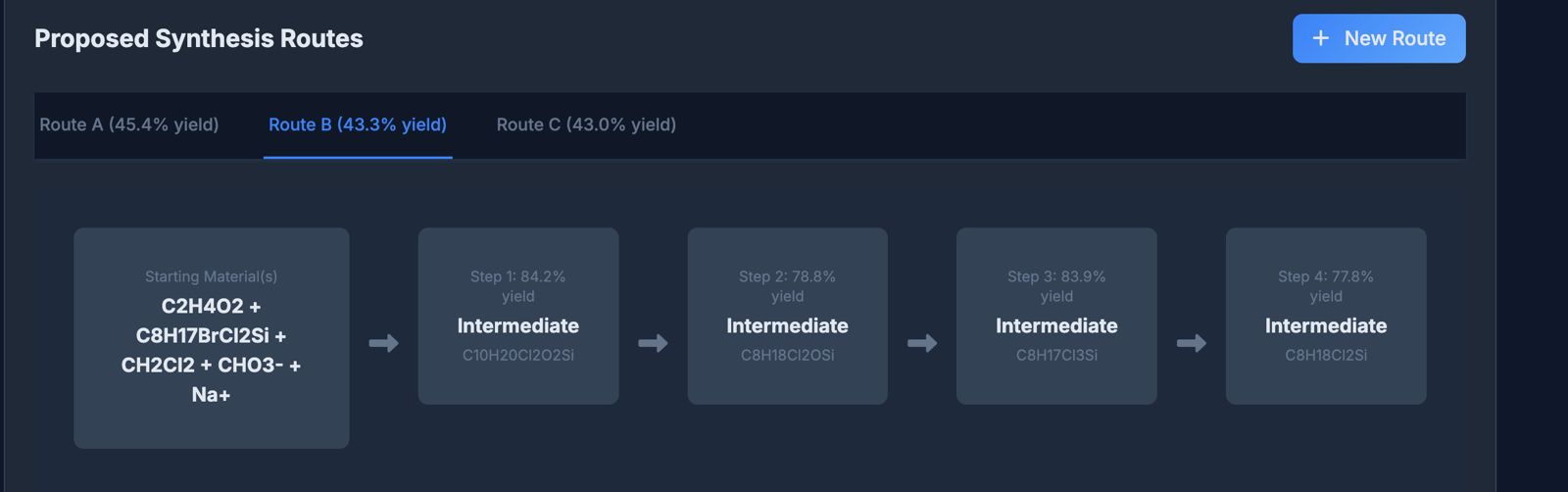
Comprehensive, AI-powered web platform fundamentally accelerating chemical synthesis research. Integrating literature analysis, hybrid synthesis planning, reaction optimization, and logistical cost analysis into a cohesive workflow blending cheminformatics with deep learning.

Bio-Inspired Undulatory Fin
Bio-mimetic underwater robot achieving locomotion through a stingray-inspired undulating fin mechanism. Engineered using Arduino/servos with a 3x3 factorial experiment in a water tunnel, quantifying thrust using NI DAQ and load cells for efficient underwater propulsion.
Work Experience.
Jan 2026 - Present
Control Systems Engineer
ARMATRIX · Full-time
At ARMATRIX, I am architecting the core software framework for the robotic arm, defining the system-level hierarchy to ensure scalable control and navigation. This includes developing and deploying Sequential Convex Programming (SCP) and QP-based soft-constrained MPC algorithms, enabling high-fidelity navigation through narrow gaps and high-obstacle density environments. Additionally, I am engineering a high-fidelity dynamic simulation environment in MuJoCo, bridging the Sim2Real gap through detailed physics modeling and system identification to accelerate control tuning.
🎯 Strategic Career Move
Following my time at Columbia and CMU, I’ve chosen to return to India to focus on deep-tech robotics. For me, this move is about prioritizing engineering substance over geography. My experiences in the US, from developing surgical robotics to engineering advanced pathfinding algorithms, honed my ability to bridge first-principles math with real-world hardware deployment. I’m excited to bring that technical rigor home to solve complex problems and contribute to the growth of India’s robotics ecosystem.
May 2025 - Aug 2025
Robotics Intern
Neocis Inc.
As a Robotics Intern at Neocis, I engineered an analytical dynamic model for the 7-DOF YOMI surgical robot arm, leveraging RNEA, CRBA, and System ID techniques. This high-fidelity model was instrumental in implementing Computed Torque control, which enabled advanced compliant behaviors. My contributions directly supported a strategic initiative to reduce the YOMI's production cost by 20%. I also designed critical CAD models for PCB fixtures to integrate new encoders into the arm's control system.
Mar 2023 - Dec 2023
Student Research Intern
Carnegie Mellon University
During my research internship at Carnegie Mellon University, I architected and implemented a novel Heuristic-Search algorithm in C++ to solve resource-constrained shortest path problems. By incorporating advanced techniques like dominance criteria and partial path pruning, my solution achieved a 2x performance increase over the existing baseline. Moreover, I also worked on testing algorithms developed by a colleague and to validate these findings in a real-world context, I developed a ROS2 framework to benchmark my algorithm against others, proving its superior efficiency in autonomous systems.
June 2022 - July 2022
Design Intern
Pacify Medical Technologies
At Pacify Medical Technologies, I led the design of a compact syringe-gun injection mechanism. Using SolidWorks, I engineered a new holder and nozzle assembly that achieved a 25% reduction in size. To enhance device reliability, I integrated a force-sensitive resistor with an Arduino to provide active load measurement, effectively preventing breakage under operational stress. My role also involved collaborating with suppliers to source materials, which successfully reduced a potential budget overrun by 5%.
Selected Projects.
A collection of my work spanning robotics, AI/ML, and autonomous systems.
ChemsynthAI
AI-powered web platform designed to accelerate chemical synthesis research. Integrates literature analysis, multiple retrosynthesis strategies, reaction optimization via Bayesian methods, and logistical planning into a cohesive workflow.
Transformer-based MPC for 7DoF Arm
Developed a transformer-based Model Predictive Controller for real-time trajectory optimization of a 7-DOF robotic arm, enabling adaptive and precise manipulation.
Heuristic Search for RSCPP
Developed an A*-like algorithm in C++ to solve resource-constrained shortest path problems with fuel constraints, outperforming baselines by 2-8x.
Agentic Personal Assistant Team
Multi-agent system with specialized AI agents working collaboratively to handle diverse personal assistant tasks using LLMs and tool-based reasoning.
ScholarSync
Collaboration platform for researchers featuring real-time document editing, reference management, and automated citation formatting for academic teams.
Bio-Inspired Undulatory Fin
Designed a robotic fin mimicking stingray motion for efficient, low-acoustic underwater propulsion, securing ₹2 lakhs funding.
NeuroSymbolic AI Research
Combining neural networks with symbolic reasoning to create hybrid AI systems capable of both learning from data and logical inference.
VitalMesh
Intelligent healthcare communication with AI voice agents for triage, real-time EHR integration, and multi-agent processing using Coral MCP protocol.
Tribal Knowledge Vision
Computer vision system for capturing and digitizing tacit manufacturing knowledge, enabling knowledge transfer and process optimization in industrial settings.
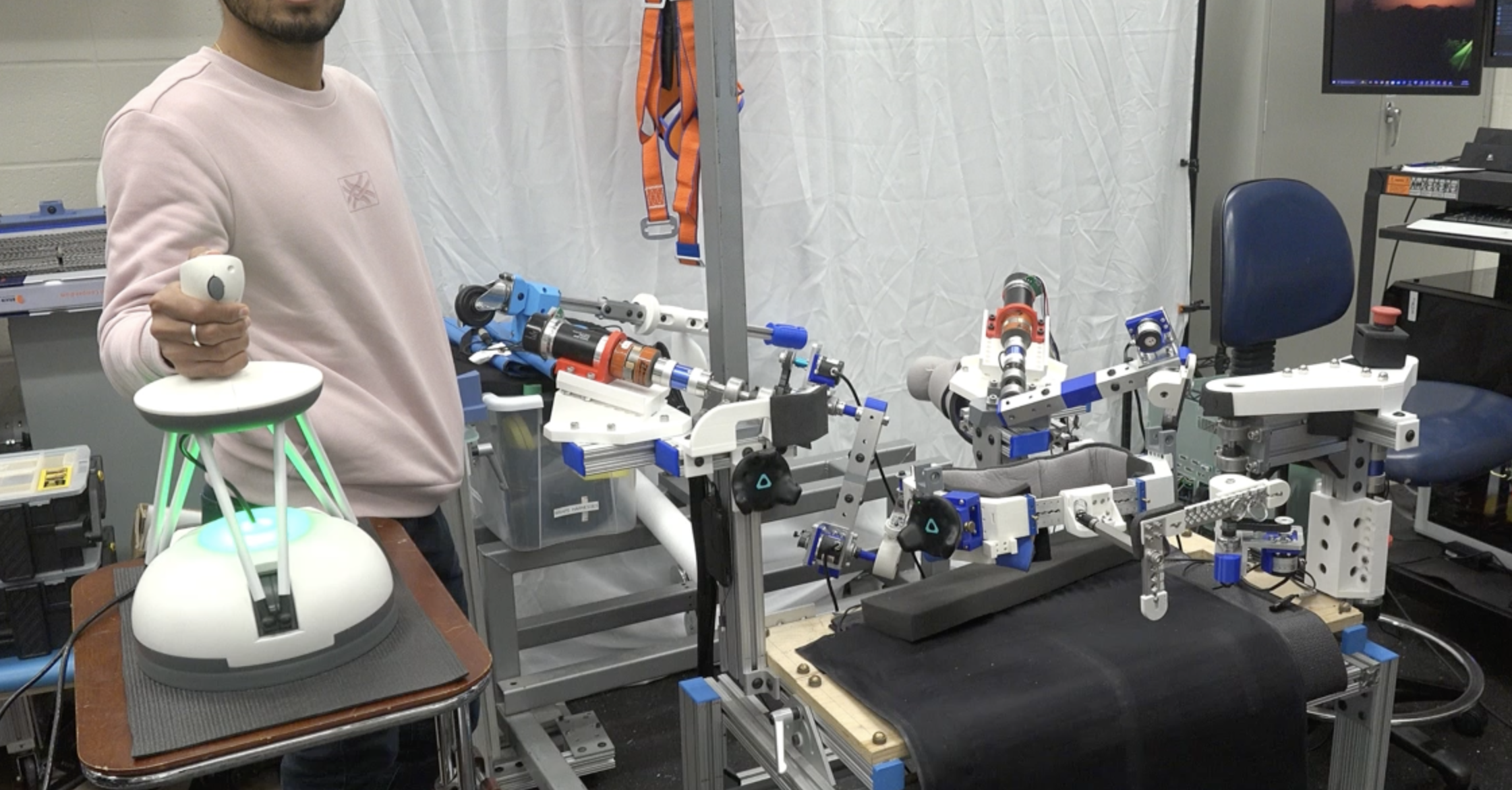
Haptic Joystick Control
Developed a PD-based haptic control system for a rehabilitation robot, enabling remote therapy for SCI patients.
Asclios
AI-driven health monitoring system integrating wearable sensor data with predictive analytics for personalized wellness insights.
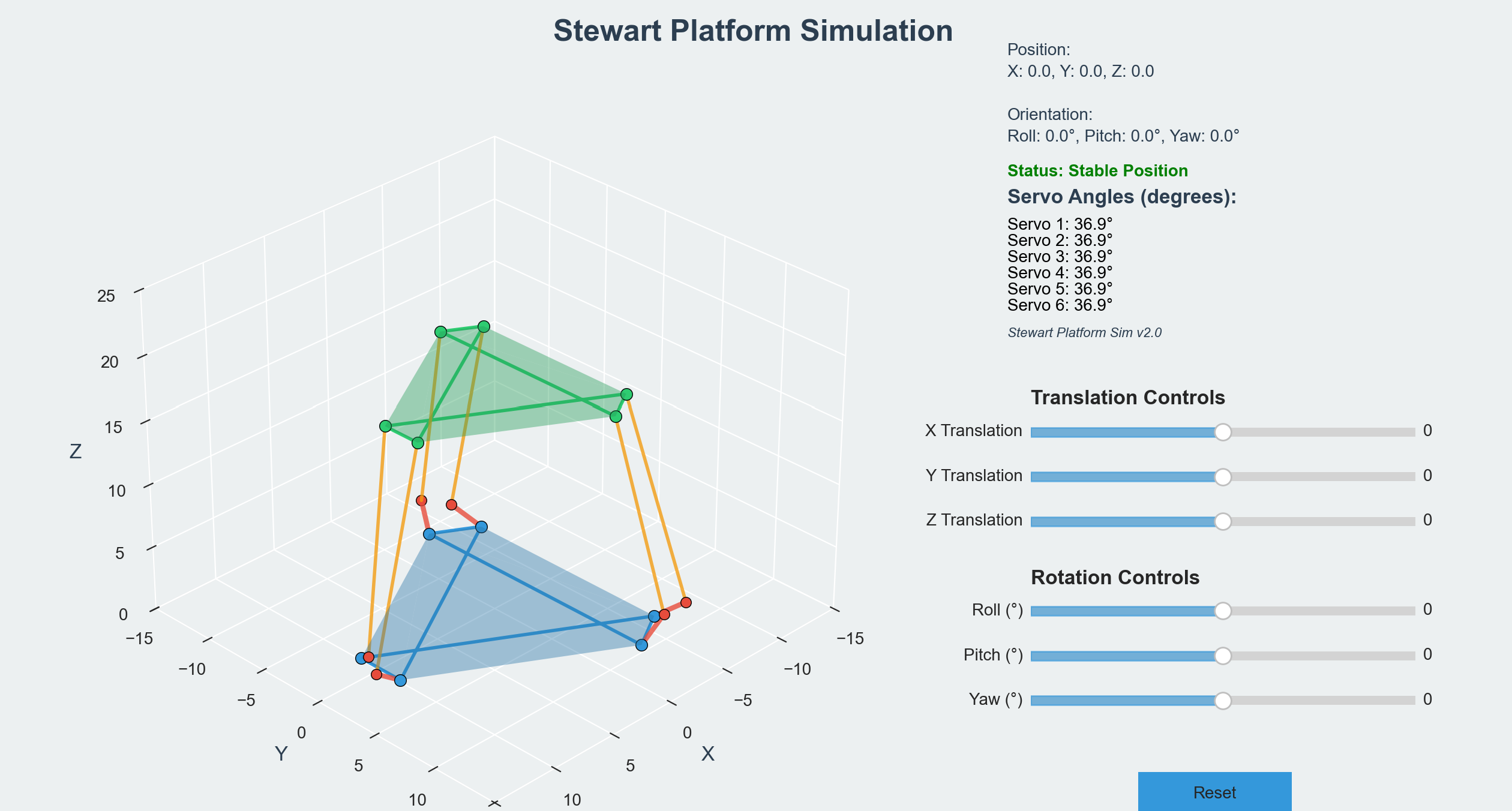
Stewart Platform Kinematics
Interactive 3D visualization tool for 6-DOF parallel manipulator with real-time IK solver and stability analysis.
Cognitive Digital Twin
AI-powered digital twin framework for real-time manufacturing optimization using LLMs and reinforcement learning for adaptive decision-making.
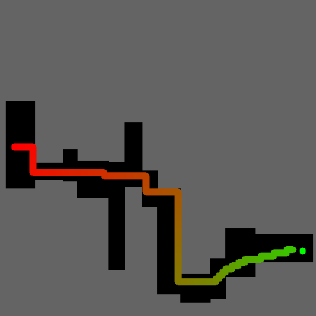
Path Planning via Deep RL
Formulated a DQN-based planning algorithm for mobile robots in unknown environments, leading to an ACM AIR 2023 publication.
Sunnovation Platform
Web application for solar energy optimization and monitoring with real-time analytics and predictive maintenance features.
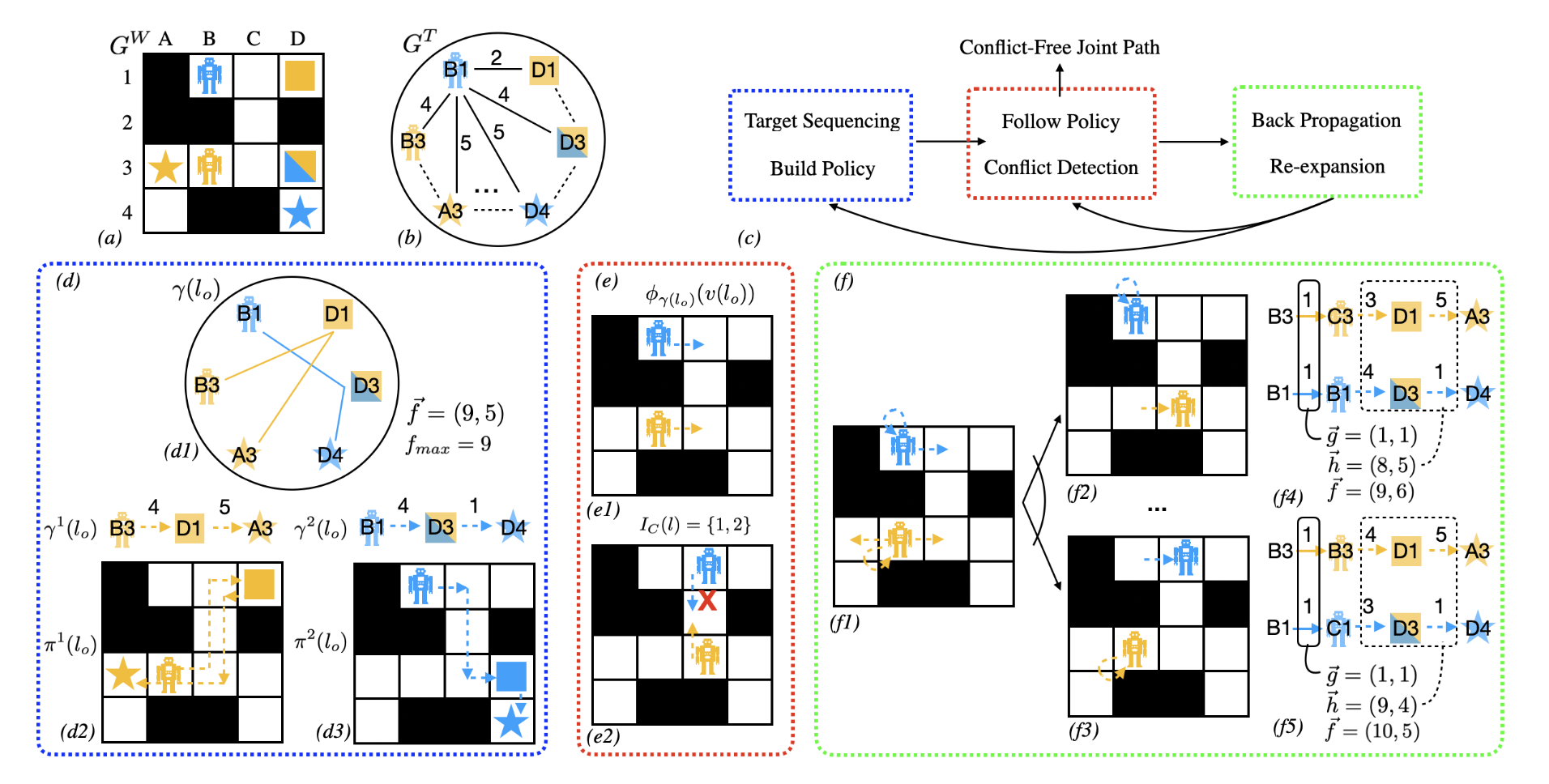
Validation of DMS* & MS*
Validated combinatorial search algorithms on ROSbots, proving DMS* is 2x faster by better distributing intermediate targets.
Image-2-3D Reconstruction
Deep learning pipeline for generating 3D models from 2D images using neural radiance fields and diffusion models.
Local LLM Personal Assistant
Privacy-focused personal assistant running LLMs locally with tool integration, knowledge base, and task automation capabilities.
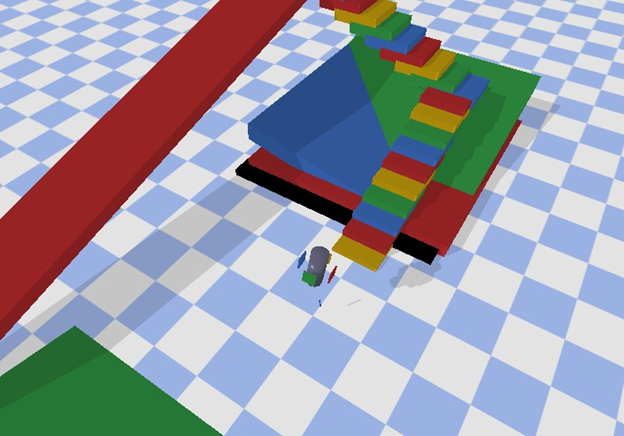
Single Legged Raibert Hopper
Designed a Raibert Hopper in URDF and implemented a PID controller for balance and navigation using an inverted pendulum gait.
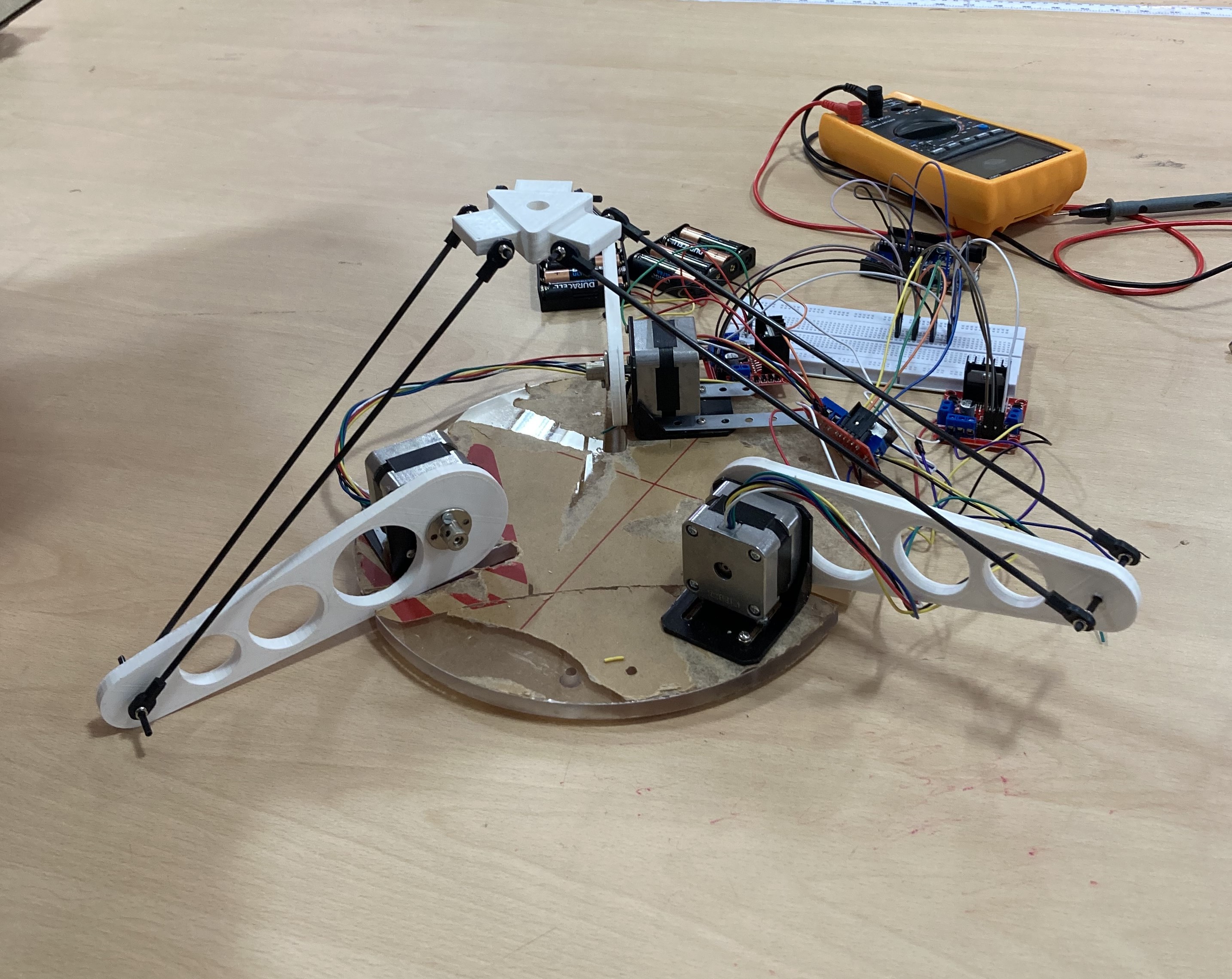
Delta Parallel Robot
Developed a Delta robot from concept to hardware using 3D printing, acrylics, and a PID controller with an Arduino Mega.
LLM Aero Input Generator
LLM-based tool for generating CFD simulation inputs and parameter configurations for aerospace applications using natural language.
Publications.
Heuristic Search for Path Finding With Refuelling
S. Zhao, A. Nandy, H. Choset, S. Rathinam and Z. Ren
IEEE
Robotics and Automation Letters, vol. 10, no. 4, April 2025
Maze Solving Using Deep Q-Network
Anushtup Nandy, Subash Sehsashtri, Abhishek Sarkar
Advances In
Robotics - 6th Intl. Conference of The Robotics Society (AIR 2023)
DMS*: Towards Minimizing Makespan for Multi-Agent Combinatorial Path Finding
Zhongqiang Ren, Anushtup Nandy, Sivakumar Rathinam, and Howie
Choset
IEEE Robotics and Automation Letters 9.9 (2024)
Get In Touch.
I'm always open to discussing new projects, research, or potential collaborations. Feel free to reach out.